

zeke
-
Posts
35 -
Joined
-
Last visited
Recent Profile Visitors
3,072 profile views





zeke's Achievements
")





-

MSX 100V spotted at Santa Clara Square (Bay Area, CA) walking dog
zeke replied to xorbe's topic in Local Group Meet Ups
My co-worker just sent me this! Was it a small dog, about the size of a large rodent? Was the rider simultaneously either checking his phone notifications, or using an electric shaver? If so, it was me Do you go on Mike Burton's rides? He's putting one together tomorrow at 6pm heading out from Akamai (~31mi round trip so bring a charger and a flashlight) -
Yes, I believe so. They've already done a lot of the work that's needed for it, anyway.
-
Glad to see more rallying in support of better safety from overlean. Haha yup. Well okay maybe not this, but yes some better means of communicating to the rider how much margin is left. Simply prohibiting the rider from going higher speeds is ineffective, because overleans can still occur even at low speeds from heavy riders attempting aggressive acceleration. Overbuild the EUC so it can never have an overlean, no matter the rider weight? That would be cost- and performance-prohibitive. Force the rider to always ride with a certain amount of margin? Perhaps, but how much? (That's what they currently do.) Ultimately the best thing is just to communicate how much margin is left, and let the rider decide. The best way to understand this phenomenon is to consider what happens when sprinters lean too far forward while running and their legs can't keep up: This is a rare occurrence when you're running, even competitively, because you can feel how tired you are. Same thing on an EUC: lean too far forward and at some point, it simply can't keep up anymore and you faceplant. Difference is, you can't feel how "tired" the EUC is. Solution? We need to know how tired the EUC is. Not just a randomly programmed beeper or tiltback warning that kicks in at an unknown point; we need feedback that tells us, in no uncertain terms, how much margin is left before we wipeout. This information is kinda important.
-
Summary of the wish list so far. A. General Faster EUCs Bigger batteries Lower weight Better mobile app Access to firmware for validation and customization Tough rubberized shells, or removable bumpers B. Comfort & Control Kuji Pads standard Low-friction shin pads for accelerating/decelerating Standardized footpedal attachments so we can pick our own footpedals. Namely, Footpedals with grind guards Long footpedals Dihedral footpedals Shock absorbers (maybe) Magnetic foot attachments C. Convenience Small EUCs with modular battery packs for air travel Easier tire changes Chargers that attach to the EUC with a storage compartment for the cable Chargers that can also work in reverse as an inverter, to charge laptops or for other backup power purposes D. Safety & Reliability Better feedback to rider about, at any instant, how much thrust margin is available to avoid over-lean Better inspection and manufacturing control for first batch issues Better waterproofing Better, brighter front/rear lights Testing standards for acceleration/braking/waterproofing/range Inspection and maintenance schedules E. Security Physical kill switch key (USB dongle?) so that EUC can be locked Motion/Tamper Alarm... With bluetooth to alert phone? Lockable point for a physical lock to stationary objects Components with unique identifiers to track down stolen EUCs Is this wish list complete, or is there anything else you'd like to see in future EUCs?
-
Sure! This is my helmet. I recently upgraded to one with a visor, but I'm waiting on new lights and mirror to arrive. Rear view: These lights came with mounts for bicycles, but I modified them for my use. For the front light, I drilled two holes in the helmet and routed a ziptie through the mount's webbing straps. I thought might slide around when I first made it, but I cinched up the ziptie really tight and the tension does a good job of holding it in place: For the rear light, I also drilled two holes into the helmet to route the ziptie through. The light's bicycle mount originally had flanges that got in the way, so I cut them off. It also didn't have any good place to route the ziptie through, so I drilled a hole through it sideways: As for the mirror: This is a bicycle mirror, and for bicycles they assume you'll have plenty of vent holes to attach to. Since I didn't have any attachment points, I drilled four holes in the helmet and two holes in the mirror mount: If you're curious what drilling all these holes does to the protective foam padding... My helmet's not DOT-approved anymore, but I still have plenty of foam to spare: There were originally two holes here, but when I cinched the ziptie it crushed the foam between them so it's more of a gash. The ziptie ends up securing against the thick plastic of the outer shell. Overall, I've been very satisfied with how it has worked out.







-
I beg to differ.
-
I think those of us who use mirrors turn our head anyway. The mirror is just there so, at a glance, you can tell whether it's even worth looking without losing sight of what's in front of you. That way, if it's obvious that somebody is in the way, you don't waste precious time turning your head away from the road in front of you. Same thing applies when you're driving a car: after checking your mirror you turn your head for confirmation. Just because I'll turn my head anyway doesn't mean I'd prefer my car not to have mirrors.
-
To be technical, what you are describing is a conservative field. Within conservative fields, such as gravitational, electric, and magnetic fields, the energy required to traverse from point A to point B is the same irrespective of the path taken. Said otherwise, if you start at point A, take some random meandering path, and return to point A, then the difference in energy between the start and end is zero: then you say that energy is conserved.
-
KingSong 16X 1554Wh 2200W 16*3in (Released July 2019)
zeke replied to Jean eRide.ie Community's topic in King Song
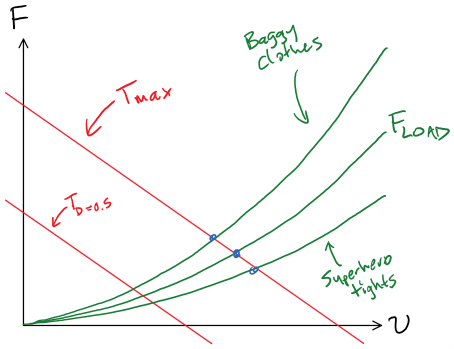
Nope, I wasn't double-counting. Consider the force-velocity line of an EUC (or any electric motor): You actually have a huge family of lines, virtually infinite in number, that are all parallel to each other and differ by the motor drive duty cycle, because duty cycle can vary continuously from 0% to 100% (it can also go to −100%, but I'll ignore that for now). I've illustrated only two lines: one at 100% duty cycle, and one at 50% duty cycle. Duty cycle cannot exceed 100%, so the top line is the most the EUC can possibly do. Now, overlay the load force that you require while you're riding at steady-state on flat ground. As long as you keep the same profile, this is a fixed curve that rises quadratically because of air drag: For illustration I've assumed you're riding at a speed that causes the motor to run at 50% duty cycle. Thus, the thrust available is equal to half of the stall thrust. At this speed, you can accelerate half as fast as you could from a standstill. You can still do some pretty sick moves, but not quite as aggressively as at zero speed. (What speed corresponds to 50% duty cycle? I don't have that information.) As you push your speed higher though, the thrust available diminishes pretty fast (because the drive duty cycle required just to support your speed gets closer and closer to 100%). Once the available thrust hits zero, i.e. duty cycle is 100%, you can't accelerate anymore and you nosedive. To make it clear, here I'll sketch the available thrust, which is the difference between the top red line and the green curve: From this it's pretty clear: the thrust available drops like a rock with speed. If you want to talk about hills, this is what happens. Uphills shift the load curve up, and downhills shift the load curve down: As a result, the available thrust also changes with incline. Going uphill, you have less available thrust at any given speed, and downhill you have more: Oh, and what if you wear baggy clothing and stand up straight, versus wearing slick clothing? These make the load curve steeper. As a result, for a given speed, if you wear slick clothing and reduce your aerodynamic profile, in theory your thrust margin is higher. (It's a bit more complicated that that, but to first order...) Absolutely. That's why you need to maintain a healthy amount of thrust available as margin to overcome these obstacles.




-
You are correct in thinking that, if you pushed a 100kg object up a 10.4° incline at 20km/h without drag, that the force you would be applying in the direction up the incline (at a 10.4° angle) is 176N. This is how wedges work: they allow force reduction, similar to a lever, pulley, or gear. Instead of having to push 980N, you only need to push 176N. You forget, however, that you would be pushing the mass in a direction up the incline with a velocity of 5.6m/s, which requires 176N×5.6m/s ≈ 1kW. Levers, pulleys, gears, and wedges don't allow you to use less energy; they just change the ratio of force to velocity. Less force, more velocity equals same power. The result is the same if you don't even consider the wedge action, and just assume you pushed the 100kg object vertically. A 100kg mass has a 980N downward force due to gravity. Traveling up a 10.4° incline at 20km/h has a vertical upwards component (in the direction of gravity) of 1m/s. So if you just pushed the 100kg vertically with velocity 1m/s, this would require a power of 980N×1m/s ≈ 1kW. Same result. Check out some physics vids on YouTube sometime, they've gotten pretty good. We're convoluting the discussion by comparing apples to oranges. That article is trying to describe how much extra range you get from regen braking under typical riding conditions, rather than how much of the regen braking energy makes it into the battery. This does not justify incorrect math. Simple thought experiment. Imagine you're driving an electric car. If you're driving in a residential neighborhood with a stop sign on every corner, you will be using your brakes frequently, and as a consequence, the fact that you have regen braking will extend your range dramatically (because instead of dissipating all your kinetic energy into heat every time you stop, you restore it). If, instead, you drive on the freeway, then you will never use your brakes and the fact that you even have regen braking will do nothing to extend your range. It is the interval between starts and stops that determines how beneficial regen braking is: with a short interval regen braking is awesome, and with a long interval regen braking is pointless. The purpose of this article is to highlight that lightweight vehicles don't carry much kinetic energy, so the interval at which you'd have to be stopping and starting for regen to have a major impact on range would need to be much shorter than for a heavier vehicle like a car. Stated differently, if a lightweight vehicle is starting and stopping at the same interval as cars, then its range benefit due to regen braking (as a percentage) will be smaller. A deeper discussion would involve the ratio of mass to drag, but let's not get into that. TL;DR: going up and down hills really does require lots of power.
-
KingSong 16X 1554Wh 2200W 16*3in (Released July 2019)
zeke replied to Jean eRide.ie Community's topic in King Song
Lol, sorry for being pedantic! This is the short of it. The faster you go, the more thrust is needed to maintain your speed because drag force is rising. The faster you go, the less thrust the EUC is capable of providing (this is a characteristic of all electric motors). The difference between the thrust the EUC can provide, and the thrust you're already using, is how much leftover thrust is available for you to do as you please like trying to speed up or whatever. If there is zero thrust available, or if you suddenly lean forward and create a need for thrust that exceeds what is available, then you can't launch the EUC in front of you anymore so you can't slow down. (And then you apply the skin brakes.) It's clear that the point where available thrust reaches zero is a very critical, very important point. A hard limit. You could call this the wipeout point. As you can imagine, the available thrust drops very quickly as you go faster, because the thrust needed to maintain speed is rising at the same time that the thrust the EUC can provide is dropping. At low speeds there's tons of thrust available, but at high speeds there's very little. And eventually, at some high speed, there's zero thrust available. This means that although you might be able to accelerate super quick from a standstill, if you try to pull the same G's at full speed, or even at half speed, you'll nosedive. On top of it all, when you start throwing in other variables (like hitting different size bumps, going up inclines, fighting a headwind, or low battery), the wipeout point changes. It's super tricky to know how much thrust you have available, or how much faster you can go until you reach the wipeout point, because currently the feedback from the EUC doesn't give enough information to know it. The only way to really know the limit is to reach it and see what happens. With the current generation of EUCs, the only thing you can do that's safe(ish) is to trust the alarm, and as you go faster, accelerate sheepishly. Oh, and if you do hit the wipeout point, bend your knees really fast to unload the EUC so it has an easier time getting ahead of you. It's kind of a last-ditch effort, and it won't work in all circumstances, but it can save your skin. -
Exactly. If the motor current is zero, then it's not absorbing any regen power into the battery. The problem of over-charging your battery is solved. If the electronics were better waterproof, this could be an interesting idea. So long as you don't fall and spill boiling water on yourself.
-
Ah, understood. I mistook you to mean you turn off all warnings. The reason I don't use tiltback on the MSX is because it's programmed really weird and annoyingly. I really liked the KS18L's tiltback. At speed, I can barely hear the MSX's beeper. A chirp (unlike a beep, which plays a single tone, a chirp is defined to sweep across a large range of frequencies quickly) would be more noticeable. It would also be preferred if the sound was directed upward, instead of to the sides. Ah, the price I pay for a higher performance but poorly designed EUC.
-
Okay! Give me a few days though; I have a project deadline to hit.
-
Oh dear, we're going to have to untangle some misconceptions about how motors work. I'll save that for another post perhaps. Interestingly enough, it already does this. The trick is, you have to go very, very slowly. But that's probably not what you wanted to hear. It's a bit more complicated, but yes I've thought about having a mode that intentionally dissipates the energy rather than storing it in the battery. On several occasions I've found myself with a fully charged battery, wanting to descend a hill. To avoid walking like a plebian, I burned off the extra energy by zooming around like a maniac to dissipate the energy into air drag. The energy could be dissipated as heat in a couple ways: Without adding any extra components, the energy could be dissipated as heat into the motor windings and MOSFETs. This would require reprogramming the EUC firmware to make the ripple current very large, so that the RMS current is much larger and increases IRMS2R losses. Also, the motor driver switching frequency could be increased (perhaps in short, high-frequency bursts) to burn energy into transition losses. With the addition of a resistor that is switched into parallel with the battery, the energy could be dissipated as heat into this resistor. This approach is common in motor drives and class-D amplifiers to avoid "bus pump." In either of these approaches, the extra power dissipation into the EUC would be tremendous. Normally, when you regen brake, about 90% (assuming the EUC operates with 90% efficiency) of the energy delivered to the EUC is delivered back into chemical energy in the battery, and the remaining 10% is dissipated as heat into the motor windings and driver. It is not uncommon to deliver 2kW into the EUC while descending a hill, so the cooling system is built to handle about 200W while the battery absorbs 1.8kW. If you instead dissipate all of the energy into the EUC as heat, then the cooling system needs to handle 2kW instead. That's a big difference which would require a big fan. You could constrain the dissipative braking power to 200W or thereabouts, whatever the cooling system can handle, and only allow the rider to descend below speeds that dissipate this much power. Not much fun, but it'd do the trick. Note that cooling becomes more difficult at low speeds, where there isn't much airflow. Another possibility is to install brakes. Unlike electronics, which must be kept at low temperatures not exceeding 150°C and therefore must have very large heat sinks in order to dissipate a given amount of heat power, brakes are a simple structure that can still function at very high temperatures and therefore don't need extravagant cooling systems. Or better yet, carry chains and drag them behind you when you need to descend on a full charge. Or perhaps, just bomb down the hill so fast that air drag eats all the energy, like a skydiver at terminal velocity. The steeper the hill, the faster you go. Any limits or changes you make to the battery current are directly tied to changes in the motor behavior, such as its torque. You can't just "limit the regen current" without changing the torque the motor produces, unless you're providing something else (besides the battery) to eat the regen energy. And of course, the motor torque must be a certain value, in accordance with the rider's weight and the grade of the slope in order to prevent the rider from simply accelerating down. If y'all want, I can make a post about how to think about motor drives. But rest assured, when you go down a hill the energy is going into your battery. Unless you fall off, in which case it goes into your skin.














